自造车新势力理想汽车交付旗下首款量产车—理想ONE以来,便获得较高的市场关注度。从销量方面来看,理想ONE历时10个月销量破2万,创下国内造车新势力最快销量纪录,足以证明该品牌获得不少青睐者。
不久前,青岛一辆理想ONE在G18高速发生了严重追尾事故再次引起热议,理想汽车官方分别对“A柱断裂”、“气囊未起爆”、“辅助驾驶系统失效”三个方面作出回应。
没想到,近日又有一辆理想ONE发生了几乎一模一样的事故,同样启动了自动辅助驾驶系统。不同的是,此次事故中理想ONE车主负全责。

10月20日19时30分,东莞的杨先生驾驶理想ONE新能源汽车行驶到京港澳高速1761公里往南,与前方行驶的一辆半挂货车追尾。
从理想ONE的行车记录视频显示,杨先生驾驶理想ONE行驶在高速左侧车道上,而前方一辆半挂货车开启转向灯并尝试并线,此时两车相距较远。当半挂货车继续并线过程中,理想ONE继续高速行驶,并撞上半挂货车尾部。

据了解,当时理想ONE处于“辅助驾驶”行驶状态,而该车是杨先生刚买的。杨先生表示,事故发生前并没有睡觉,双手一直放在方向盘上,可能当时看了一下右方情况,转过来时就发现撞上了。
面对警察的询问,驾驶员杨先生表示,当时自己并未介入车辆操作,一直处在车辆自动辅助驾驶状态。
从现场照片来看,事故造成两车受损,理想ONE车头右侧损毁严重,机舱盖和右侧前翼子板撕裂。所幸事故中没有造成人员伤亡。

从视频及相关情况来看,此次理想ONE遭遇的高速事故,与9月22日青岛事故的情况几乎相同。处于自动辅助驾驶状态,追尾正在并线的货车,车辆系统没有任何提示,车主注意力不够集中等等,而不同的是,此次事故理想ONE车主负全责。
郴州高速警察10月21日发布事故通报,官方特意强调“又是自动驾驶惹的祸!”
郴州高速警察通报称,经询问,理想电动车驾驶员杨先生使用的是车辆自动驾驶功能。所幸没有造成人员伤亡。通过调查,前方半挂货车驾驶员李某操作正常,属于正常变道,但杨先生驾驶的理想电动车因使用自动驾驶功能,发生撞击前始终保持着111公里的时速行驶,未能发现前方变道车辆及时减速刹车,导致事故发生。杨先生承担此次事故的全部责任。

郴州高速警察官博在回复网友疑问中还进一步表示,“前车很远距离就示意要变道,后车完全没有任何制动;造成这个事故的原因就是理想车主使用自动驾驶辅助系统,放弃了对车辆的人工介入,造成了追尾。”

为什么理想ONE自动辅助驾驶系统再一次“失效”,未能识别前方车辆?在关于9月22日青岛高速追尾事故中,理想汽车的官方说明已作出解释——
“目前辅助驾驶对于旁边车道上车辆变入主车道的识别具有局限性,没法在旁边车道车辆并入1/5车身的时候识别成主要目标,这也是目前L2级辅助驾驶系统的局限性。L2级辅助驾驶还是以驾驶员为主来控制车辆,不能完全替代驾驶员做决策,也请各位用户安全使用理想ONE的辅助驾驶系统。”
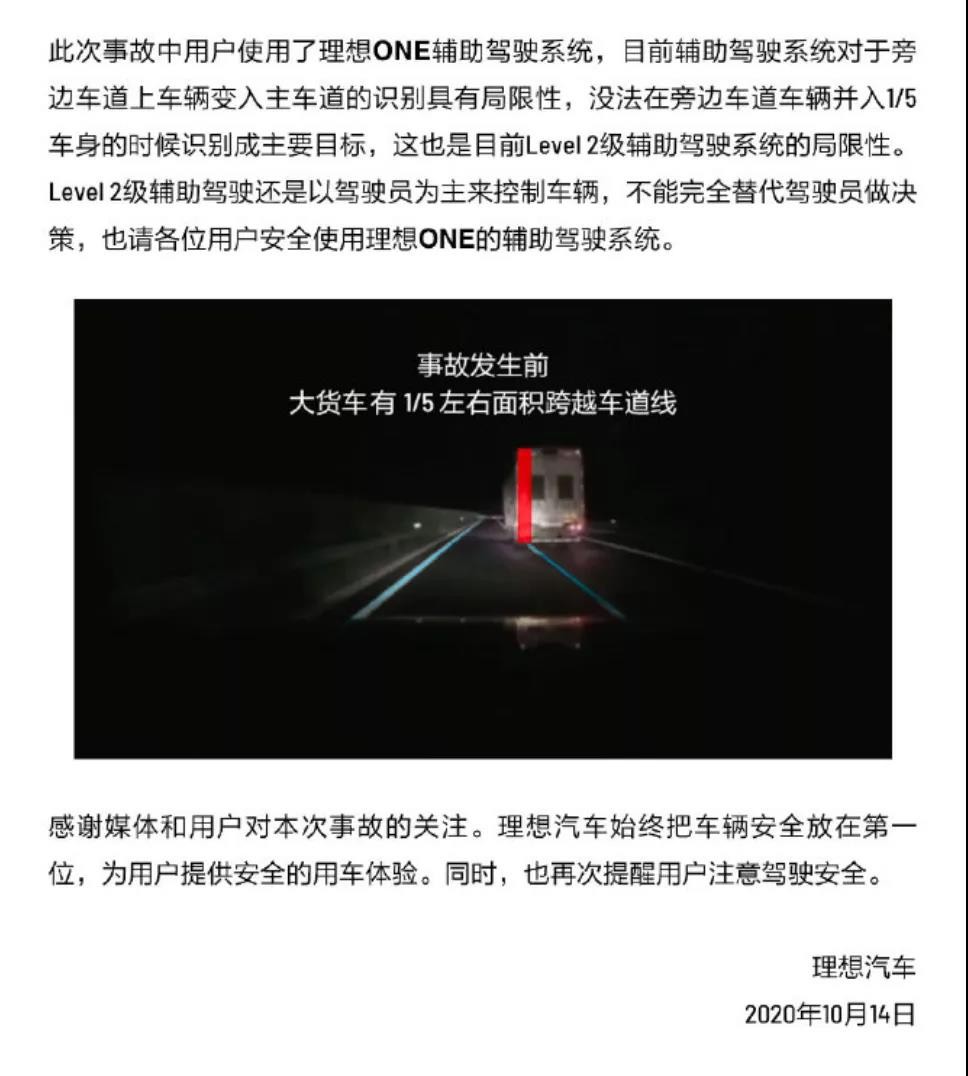
(9月22日青岛交通事故的理想汽车官方说明)
因此,不管从高速警察的说法,还是理想汽车的解释来看,使用辅助驾驶系统下出现的交通事故,车主都有可能因“放弃人为介入”而承担责任,车主应当时刻接管与控制车辆。
目前绝大部分车辆所搭载的辅助驾驶功能,仅仅限于辅助驾驶,并不能实现完全自动驾驶,驾驶员本身应当时刻关注道路状况,并实现对车辆的自主控制,并不应该过度依赖车辆辅助驾驶系统。因此有网友提醒,“不要把自己的命交给不靠谱的机器来管理”。
文章转载自汽车行业关注,仅供参考,版权归原作者所有。